
旋转热对流实验系统
1.研发意义
旋转流体中的热对流具有显著的涡旋特征,是地球物理流体和太阳内部流体运动的基本概念模型,揭示这种对流的爆发机制和涡旋结构对天气预报和太阳活动预报有重要意义。前人(我国尚无人研究)对这一基础问题的研究集中于用物理实验对宏观流场做统计研究,以及运用湍流直接数值模拟方法研究流场精细结构。然而,尚未有人做实验从热力角度研究过对流爆发程,也没有人用物理实验对涡旋结构做精细测量。
本装置可以将水槽放在平台上旋转和加热,同时进行精密速度、温度测量和监控,可以对这种热对流的爆发和演变过程进行细致研究。整套装置成本在3万元以下,操作方便,特别适合地球物理、工程流体等专业的实验教学和本科生探究训练。
2.系统组成
整个系统由旋转平台和流场后处理软件组成两部分组成。
3.旋转平台介绍
 |
 |
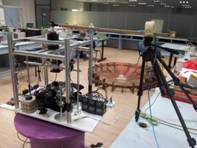
图1整体概览 |
图2:整体概览 |
本装置主体结构由八大系统组成,分别为转盘主体,旋转供电系统,动力系统,实时监控系统,照明系统,拍摄系统,遥控热力系统,测温系统。
3.1水槽主体
 |
 |
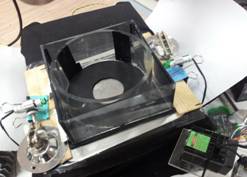
图3:水槽结构图 |
图4:水槽实物图 |
水槽主体为双层结构,由外侧的有机玻璃壁和内侧的有机玻璃柱组成,两者均无底面。以圆柱区作为实验区,以保证实验时的各向均匀性。圆柱与正方形四壁之间部分在实验时为满水状态,以消除圆面对于光线的偏折作用,保证拍摄画面的质量。水槽底选用20*20cm厚2mm的铝板以保证其强度,耐热性和导热性均处于实验要求之内。铝板与有机玻璃粘连保证密闭性,在铝板处于有机玻璃圆柱内的区域表面粘贴有外直径14cm,内直径6cm的橡胶环垫用以绝热和遮挡非观测部分,保证处于最中心的圆内的主实验区不受任何影响。在有机玻璃壁的左右两侧,均有7.5cm的黑色挡光帘,以消除激光的散射,保证入射激光的光束层为单一一层。
3.2旋转供电系统
 |
 |
图5:供电系统 |
图6:供电系统 |
此系统可以保证对旋转平台进行稳定连续的供电和视频信号传输。这套系统共由4大部分组成,交错框架部分,双导电环部分,中轴及其连接部分和支撑部分。通过导电环可以使电流从地面固定插座进入转盘而电线不发生缠卷。系统设计的难点是保证两个导电环的同轴同速稳定转动。这要求两导电环的外环转速与转盘严格保持一致,而两内环转速要相互保持另一转速的一致。我们用交错框架结构将两转盘外环与之固定,解决了第一个问题,通过中轴与转盘的同轴刚性连接,解决了第二个问题。这是这一系统最为关键的部分。
3.3动力系统
如图此系统由感应电机,数显控制器,和承重轴承三部分组成。电机部分与承重轴承部分隔开,有利于维护。数显控制器可以让实现对转盘转速的精确控制。
 |
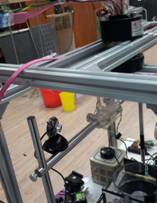 |
图7:电机 |
图8:监控摄像头 |
3.4实时监控系统
如图8,此系统由摄像头、信号导电环和电脑接收端三部分组成。此系统可以让我们从电脑端直接观察到转盘是否达到刚性旋转,实现实时监控。也可以对测温器阵列进行监控来以获得温度的实时数据。信号的传输原理与旋转供电系统相同
3.5照明系统
 |
 |
图9:激光照明 |
图10:白光灯照明 |
照明系统共有两套,分别对应的是不同的实验内容:图一是PIV实验照明系统,前方放置的绿色激光由水平入射左右的红色激光从黑色挡光帘的当中垂直入射,与转盘底成90°。实验区水中加入72μm玻璃微珠。微珠为均匀分布,当激光通过实验流体时,可以明显观察到对应水层的微珠运动情况。拍摄由带有对应颜色滤光片的相机进行。图二为墨迹实验照明系统。实验时,置于装置上部的白光灯打开,集中照亮主实验区部分,再由两台相机进行拍摄
3.6拍摄系统

图11:拍摄系统
拍摄系统由两台视野中轴平面相互垂直的单反相机组成,可从水平和垂直两个方向对实验区的系统同时进行拍摄以获得更多信息。负责水平方向拍摄的相机还可以连接遥控开关,扩展出实时连拍功能。PIV实验时,两台相机会安装对应颜色的滤光片。
3.7遥控热力系统
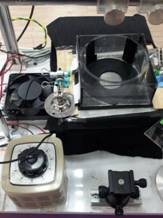


图12:遥控热力系统
遥控热力系统主要由四部分组成,加热黑箱,冷却装置,变压器和遥控开关。黑箱为此系统中的核心部分。内部结构见末一张照片。黑箱核心部件为220v,200w的白炽灯泡。通过将灯泡与转盘铝制底部隔开,来使白炽灯泡的主要加热作用变为辐射传热,这种方法的优点是易于调控加热强度和位置。因白炽灯辐射加热效应过强,故以黑色挡光帘将其余部分遮住。装置也得名于此。变压器用以调节灯泡亮度。散热片与风扇组合可以产生沿散热片方向的对流,通过冷却装置的对流来对仪器降温。试验中需在运转过程中开始加热的问题,由遥控开关部分加以解决。
3.8测温系统

图13:测温系统
测温系统是由测温表组成的测温器阵列,探头采用测温精度0.1K,直径3mm左右的铂电阻探头来替代原有对扰动过于敏感的合金探头,测温器阵列按照高度顺序安放,如将探头固定在转盘中,可以精确的得到固定处的温度廓线情况。
4.流场后处理软件
4.1粒子速度测量技术简介
PIV(particleimagevelocimetry,粒子图像测速)可以“瞬时无接触测量流场中一个界面上的二维速度分布且具有较高测量精度”[1]。PIV技术广泛应用于航空、热能工程、海洋等领域的流体实验,至今已发展至三维流场重建。
PIV的原理如下图所示:
图14:粒子速度测量的原理
视频:烧杯中的旋转水流
用一台片激光器打量流体的一个剖面,剖面上的示踪粒子被照亮。由于片光有一定厚度,故CCD看到的粒子运动实际是它在剖面上的投影,在图1中看到的是u-w速度场。在流场图像后处理方面,一般来说有以下3步:
- CCD以摄像方式连续获取图像,通过比较相邻几帧的画面来识别粒子;
- 确定粒子在一定时间内的运动轨迹,反演处单个粒子的瞬时速度甚至加速度;
- 将离散的速度信息插值到网格上,获得速度场。
4.2本技术的功能
本技术能够利用两台低档单反相机和200mw的红/绿线激光器各一台即可实现两个剖面速度场的同时测量,用MATLAB处理得到两组二维速度场,获取综合的流场信息。对于每个剖面的测量,可在![]() 的小区域内对流速小于5cm/s的流场做到高分辨率测量,分辨率的具体数值取决于流形的复杂程度。
的小区域内对流速小于5cm/s的流场做到高分辨率测量,分辨率的具体数值取决于流形的复杂程度。
4.3本技术的操作过程
在实验操作方面,实验者向待测流体(要求密度在![]() 上下)中投入少量密度为
上下)中投入少量密度为![]() 72
72![]() 玻璃微珠(河北工业大学工程流动与过程强化研究中心制作),用片激光将感兴趣的剖面照亮。在放入粒子足够长时间后,保证粒子能跟随流体运动,方可进行拍摄。为了减少杂光干扰,需要在容器壁上做遮光处理,且要在暗光条件下实验。
玻璃微珠(河北工业大学工程流动与过程强化研究中心制作),用片激光将感兴趣的剖面照亮。在放入粒子足够长时间后,保证粒子能跟随流体运动,方可进行拍摄。为了减少杂光干扰,需要在容器壁上做遮光处理,且要在暗光条件下实验。
在后处理方面,我们编写了一组MATLAB函数用于处理,流程如下:
(1)调整并运行Pretreatment_1.m,剪裁出感兴趣区域,确定高帽变换的筛选半径。筛选半径与粒子在数字图像中的半径像素值有关,要操作者自行试验确定。
(2)调整draw.m,确定输出哪些流场信息,默认只输出速度场。
(3)运行2_run.m,程序会在自己所在目录下输出每一个时次的反演结果于后缀为.mat的数据文件中,同时输出感兴趣的后缀为.jpg的图像文件。
4.4后处理函数的功能介绍
下面通过一个例子按处理顺序介绍各函数功能。该算例将反演水槽里一个涡旋。run.m是主程序,在点击Pretreatment_1.m后会依次执行其他函数。
(1)Pretreatment_1.m
该程序在主体程序运行之前作为数据预处理之用,主要功能为:视频读入、图像裁剪、确定顶帽变换合适半径。一般需要经过多次测试确定出剪裁起始横坐标、起始纵坐标、剪裁图像的长度、剪裁图像的宽度(分别记为Row\Col\row0\col0\r,5个变量)
(2)tophating.m
读取视频某一帧,做顶帽变换,输入视频信息矩阵和第几帧,输出处理完的二值图像。顶帽变换算法由MATLAB程序包提供,其功能是将一定半径的亮点提取出来。
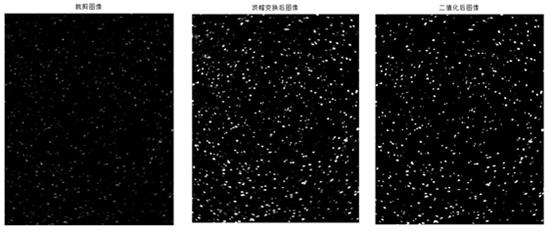
图15:原始单帧图像 图16:顶帽变换后图像 图17:二值化后图像
(3)center.m
读取某一幅处理好的二值图像,输入二值图像矩阵,输出每个亮点中心的坐标矩阵。这里用到了MATLAB自带的regionprops函数,用于提取区域。
(4)nearest.m
最小近邻法原理,输入两组中心点坐标向量,输出配对好筛选好的两组坐标向量组
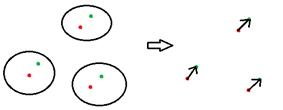
图18:最小紧邻法配对的原理
输入前后帧配对的坐标组,输出矫正后的坐标组。将配对矢量场中一些方向明显与周围流动异常的矢量剔除,考虑到流动连续性,运用方法为:
依次比较某个矢量和其最近邻的两个矢量的夹角,以及其长度与周围矢量长度关系,大于给定误差范围就剔除该矢量。校正结果如下图:
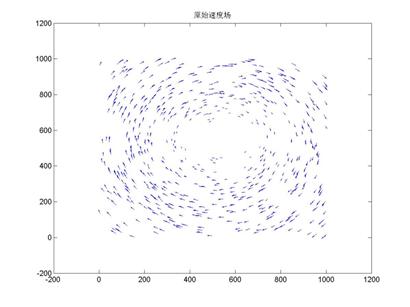
图19:识别出的离散粒子速度矢量
(5)Interpolation.m
插值速度场,将离散的速度矢量插值到给定的网格点上,输出网格数据。插值结果如下图:
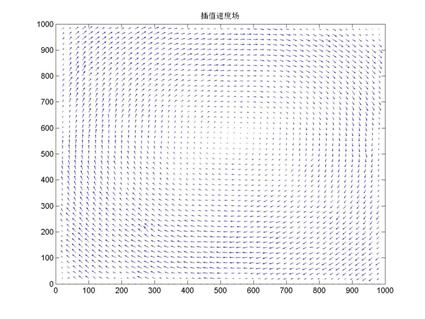
图20:插值处的二维速度场
(6)draw.m
调用处理结果,批量绘制简单的速度矢量图。此时要通过自己拍照做出像素坐标和物理坐标的对应关系,比如对本次试验:1cm对应769个像素,如图21。
图21:坐标转换标尺
4.5本方法的创新点
本方法的特点是:低成本,与硬件匹配方便,原理简单便于教学。在硬件方面,只需一台可调光圈和焦距的低档单反相机和一台200mw线激光器,即可对![]() 小区域内的低速流动进行高精度测量。
小区域内的低速流动进行高精度测量。
4.6PIV实验所用的硬件型号
单反相机:佳能600D,佳能650D
线激光器:“盛钻激光”200mw红色一字线激光器,“纤绿东莞”200mw绿色激光器
示踪粒子:示踪粒子。河北工业大学工程流动与过程强化研究中心制作,香港麦迪技术有限公司监制。
5实验系统的应用
我们利用这套实验系统研究了旋转平台上的热对流,完成了一篇待发表的学术论文,见附件。
6参考文献
[1]近代流动显示技术[M].国防工业出版社,2002:125-126.